Mạch cầu H là gì? Cấu tạo và cách thiết kế mạch cầu H
Bạn có thể tìm hiểu cách thiết kế mạch cầu H từ nhiều tài nguyên trực tuyến và ngoại tuyến. Sau khi tham khảo nhiều mạch cầu phức tạp khủng khiếp. Một số hướng dẫn rất tốt, một số thì lại không. Tuy nhiên, khi tôi bắt đầu làm việc với chúng, tôi đã có nhiều kinh nghiệm và nhận ra một số điều bị thiếu trong các hướng dẫn thiết kế đó. Vì vậy, tôi quyết định viết ra những gì tôi đã học và cố gắng sắp xếp mô tả đó thành một cấu trúc dễ hiểu nhưng toàn diện.
Công việc này bắt đầu như một bộ ba phần tôi đã viết, trong khi phát triển mạch cầu H của ModModule . Mặc dù tài liệu dòng điện dựa trên các bài viết đó, nhưng nó đã sửa được nhiều lỗi và được mở rộng và cập nhật rất nhiều.
Ý định của tôi là đề cập nhiều hơn đến hầu hết các bài báo tôi đã xem về chủ đề này. Mặc dù tôi không mong bạn, người đọc thân mến, nói chung là quen thuộc với mạch cầu h hoặc bộ điều khiển động cơ nói chung, tôi vẫn xây dựng dựa trên sự hiểu biết về mạch điện cơ bản. Vì vậy, nếu bạn không biết điện trở, cuộn cảm hoặc tụ điện là gì, nếu bạn không hiểu ít nhất những điều cơ bản về phân tích mạch thời gian và miền tần số, bạn không đọc đúng bài viết. Bạn có thể sẽ không thể theo dõi các cuộc thảo luận. Nhưng nếu bạn quan tâm đến thông tin cơ bản về điều khiển động cơ, nếu bạn muốn hiểu lý do đằng sau các quyết định thiết kế, nếu bạn muốn có được kiến thức sâu hơn không chỉ trong các cầu nối h, mà cả những gì diễn ra trước và sau chúng, bạn có tìm thấy vị trí của bạn.
Kế hoạch của tôi là cuối cùng sẽ mở rộng các bài viết này để bao quát không chỉ cầu h mà còn điều khiển các mạch và hệ thống cơ điện.
Những thứ cơ bản
Nói chung, mạch cầu H là một mạch khá đơn giản, chứa bốn phần tử chuyển mạch, với tải ở trung tâm, trong cấu hình giống như H:
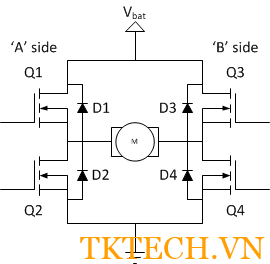
Các phần tử chuyển mạch (Q1..Q4) thường là các bóng bán dẫn hai cực hoặc FET, trong một số ứng dụng IGBT điện áp cao. Các giải pháp tích hợp cũng tồn tại nhưng liệu các phần tử chuyển mạch có được tích hợp với các mạch điều khiển của chúng hay không không liên quan đến phần lớn cho cuộc thảo luận này. Các điốt (D1..D4) được gọi là điốt bắt và thường là loại Schottky.
Đầu trên của cầu được kết nối với nguồn điện (ví dụ như pin) và đầu dưới được nối đất.
Nói chung, tất cả bốn yếu tố chuyển đổi có thể được bật và tắt một cách độc lập, mặc dù có một số hạn chế rõ ràng.
Mặc dù về mặt lý thuyết, tải có thể là bất cứ thứ gì bạn muốn, cho đến nay, ứng dụng phổ biến nhất nếu cầu H có động cơ bước DC hoặc lưỡng cực được quét (bước cần có hai cầu H trên mỗi động cơ). Sau đây tôi sẽ tập trung vào các ứng dụng như một trình điều khiển động cơ DC được chải.
Hoạt động tĩnh
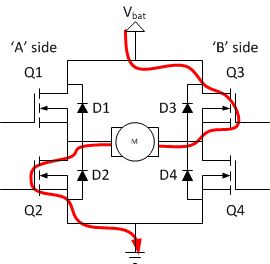
Chế độ vận hành cơ bản của mạch cầu H khá đơn giản: nếu Q1 và Q4 được bật, dây dẫn bên trái của động cơ sẽ được kết nối với nguồn điện, trong khi dây dẫn phải được nối với mặt đất. Dòng điện bắt đầu chạy qua động cơ tạo năng lượng cho động cơ (giả sử) hướng về phía trước và trục động cơ bắt đầu quay.
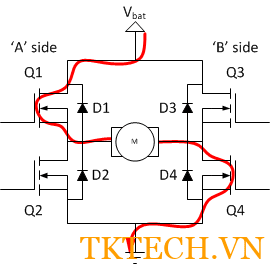
Nếu Q2 và Q3 được bật, điều ngược lại sẽ xảy ra, động cơ sẽ được cấp năng lượng theo hướng ngược lại và trục sẽ bắt đầu quay ngược.
Trong một mạch cầu, bạn không bao giờ nên đóng cả Q1 và Q2 (hoặc Q3 và Q4) cùng một lúc. Nếu bạn đã làm điều đó, bạn vừa tạo ra một đường dẫn điện trở thực sự thấp giữa nguồn và GND, làm ngắn mạch nguồn cung cấp năng lượng của bạn một cách hiệu quả. Điều kiện này được gọi là ‘bắn xuyên qua’ và là một cách đóng như được đảm bảo để nhanh chóng phá hủy mạch cầu của bạn, hoặc một cái gì đó khác trong mạch của bạn.

Do hạn chế này từ bốn trạng thái có thể, các công tắc bên A có thể chỉ có ba ý nghĩa:
| Q1 | Q2 |
| mở | mở |
| đóng | mở |
| mở | đóng |
Tương tự cho bên B:
| Q3 | Q4 |
| mở | mở |
| đóng | mở |
| mở | đóng |
Hoàn toàn điều này cho phép 9 trạng thái khác nhau cho toàn bộ mạch cầu H nằm trong:
| Q1 | Q2 | Q3 | Q4 |
| đóng | mở | mở | mở |
| đóng | mở | mở | đóng |
| đóng | mở | đóng | mở |
| mở | đóng | mở | mở |
| mở | đóng | mở | đóng |
| mở | đóng | đóng | mở |
| mở | mở | mở | mở |
| mở | mở | mở | đóng |
| mở | mở | đóng | mở |
Chúng tôi sẽ nói chi tiết hơn trong một phút, nhưng trước khi chúng tôi làm, hãy dành vài phút để hiểu những điều cơ bản về tải của chúng tôi, động cơ DC.
Mô hình động cơ
Trong khi mô hình hóa động cơ DC là một chủ đề phức tạp, một chủ đề mà bạn có thể đọc rộng rãi ở đây , đối với bài viết này, chúng ta hãy bắt đầu với một mô hình rất đơn giản! Mô hình này sẽ không thể sử dụng được cho các ứng dụng điều khiển, nơi bạn cố gắng bù điện cho các tác động của các thành phần cơ khí. Giả định chính trong mô hình được giới thiệu ở đây là các hằng số thời gian cơ học trong hệ thống của bạn cao hơn nhiều so với điện, nói cách khác, chúng ta có thể coi tốc độ trục là không đổi để phân tích. Điều đó đúng trong hầu hết các trường hợp, nhưng bạn sẽ cần đọc các bài viết khác để hiểu lý do tại sao. Bây giờ, bạn sẽ phải tin lời tôi.
Một động cơ DC là một thiết bị chuyển đổi năng lượng: nó lấy năng lượng điện và biến nó thành năng lượng cơ học. Khi hoạt động như một máy phát điện, nó làm ngược lại: chuyển đổi năng lượng cơ học thành điện.
Trong mô hình động cơ rất đơn giản này, các thông số cơ học hoàn toàn bị bỏ qua. Về mặt điện, động cơ về cơ bản chứa một số cuộn cảm, di chuyển trong từ trường. Bản thân cuộn cảm tất nhiên có một cuộn cảm, và một số điện trở trong. Chuyển động của chúng trong trường sẽ tạo ra một điện áp – được gọi là điện áp máy phát và ký hiệu là V g – trên các cuộn cảm. Từ mô tả này, mô hình sau có thể được rút ra:
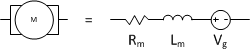
Trong thực tế, trong nhiều trường hợp, điện trở trong của cuộn cảm có thể bị bỏ qua, và một mô hình thậm chí đơn giản hơn, một cuộn cảm lý tưởng nối tiếp với nguồn điện áp có thể được sử dụng:
![]()
Trong cả hai trường hợp, tất cả các phần tử nằm trong chuỗi, vì vậy chia sẻ cùng một dòng điện, nhưng điện áp trên chúng tất nhiên là khác nhau.
Điện áp máy phát (V g ) chỉ phụ thuộc vào tốc độ mà cuộn cảm di chuyển trong trường, nói cách khác là tốc độ quay của động cơ.
Lực (hoặc mô-men xoắn trong một hệ thống quay, giống như động cơ DC) các nam châm điện này – cuộn cảm – tác dụng tỷ lệ với dòng điện chạy qua chúng.
Chế độ ổ đĩa
Trước đây chúng tôi chỉ xem xét hoạt động tĩnh, khi không có gì thay đổi. Nếu hoạt động dưới tốc độ tối đa được dự định, các công tắc sẽ được điều khiển theo kiểu PWM. Một tín hiệu PWM có hai giai đoạn, các ‘trên thời gian’ và ‘off-time’ như tôi gọi họ trong biểu đồ dưới đây:
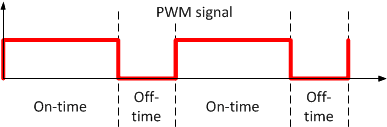
Đó là một tín hiệu định kỳ, với tần số không đổi. Nội dung thông tin – được sử dụng để thay đổi các tham số vận hành của mạch cầu H – là tỷ lệ giữa thời gian đúng giờ và thời gian tắt. Các chế độ ổ đĩa khác nhau khác nhau về cách các công tắc được đặt trong thời gian bật và tắt.
Nếu chúng ta muốn động cơ làm bất cứ điều gì thú vị, chúng ta sẽ phải kết nối nó với nguồn điện trong ít nhất một trong các giai đoạn. Hãy nói rằng đó là “đúng giờ”. Chúng tôi có hai lựa chọn: chúng tôi bật Q1 và Q4 hoặc chúng tôi bật Q2 và Q3.
Nhưng còn thời gian nghỉ thì sao? Chúng tôi có chín tiểu bang để lựa chọn. Đó là:
| Q1 | Q2 | Q3 | Q4 |
| đóng | mở | mở | mở |
| đóng | mở | mở | đóng |
| đóng | mở | đóng | mở |
| mở | đóng | mở | mở |
| mở | đóng | mở | đóng |
| mở | đóng | đóng | mở |
| mở | mở | mở | mở |
| mở | mở | mở | đóng |
| mở | mở | đóng | mở |
Nếu bạn nhìn lại mô hình động cơ của chúng tôi, bạn sẽ thấy rằng về cơ bản nó là một tải cảm ứng. Cuộn cảm có đặc tính mà bạn không thể thay đổi dòng điện chạy qua chúng ngay lập tức. Vì vậy, bất cứ khi nào mạch cầu thay đổi trạng thái với dòng điện động cơ khác không, trạng thái mới phải đảm bảo rằng dòng điện có thể tiếp tục chảy theo một cách nào đó. Các điốt bắt thường không được sử dụng cho mục đích này, bởi vì (như bạn sẽ thấy sau) chúng sẽ nóng lên quá nhiều. Tất nhiên có ngoại lệ, nhưng đó chỉ là: ngoại lệ.
Bây giờ, trong thời gian đúng giờ, cuộn cảm động cơ được kết nối giữa nguồn điện và GND. Do đó, dòng điện sẽ bắt đầu tăng thông qua các cuộn cảm. Rất khó có khả năng đến khi thời gian kết thúc và chúng ta sẵn sàng chuyển mạch cầu sang trạng thái không hoạt động, dòng điện sẽ là 0. Vì vậy, tốt nhất là chọn trạng thái cho thời gian ngoài giờ chúng ta có thể cung cấp một đường dẫn cho dòng điện dẫn chạy qua. Để làm được điều đó, chúng tôi sẽ phải đóng một công tắc mỗi bên ở hai bên của động cơ và điều đó sẽ loại bỏ các trạng thái ngoài giờ có thể của chúng tôi một chút:
| Q1 | Q2 | Q3 | Q4 |
| đóng | mở | mở | đóng |
| đóng | mở | đóng | mở |
| mở | đóng | mở | đóng |
| mở | đóng | đóng | mở |
Nếu chúng ta kết hợp bốn lựa chọn đó với hai trạng thái đúng giờ có thể, chúng ta sẽ có tám cấu hình có thể. Tuy nhiên, trong hai trong số đó cả trạng thái đúng giờ và trạng thái ngoài giờ đều giống nhau và những trạng thái đó không thú vị lắm: mạch cầu hoạt động theo cách tĩnh. Điều đó cho chúng ta sáu bản đồ có ý nghĩa, mà tôi sẽ tóm tắt dưới đây:
| Ánh xạ 1 | Q1 | Q2 | Q3 | Q4 |
| trạng thái đúng giờ | đóng | mở | mở | đóng |
| trạng thái ngoài giờ | đóng | mở | đóng | mở |
| Ánh xạ 2 | Q1 | Q2 | Q3 | Q4 |
| trạng thái đúng giờ | đóng | mở | mở | đóng |
| trạng thái ngoài giờ | mở | đóng | mở | đóng |
| Ánh xạ 3 | Q1 | Q2 | Q3 | Q4 |
| trạng thái đúng giờ | đóng | mở | mở | đóng |
| trạng thái ngoài giờ | mở | đóng | đóng | mở |
| Ánh xạ 4 | Q1 | Q2 | Q3 | Q4 |
| trạng thái đúng giờ | mở | đóng | đóng | mở |
| trạng thái ngoài giờ | đóng | mở | mở | đóng |
| Ánh xạ 5 | Q1 | Q2 | Q3 | Q4 |
| trạng thái đúng giờ | mở | đóng | đóng | mở |
| trạng thái ngoài giờ | đóng | mở | đóng | mở |
| Ánh xạ 6 | Q1 | Q2 | Q3 | Q4 |
| trạng thái đúng giờ | mở | đóng | đóng | mở |
| trạng thái ngoài giờ | mở | đóng | mở | đóng |
Bạn có thể tìm thấy một số đối xứng thú vị trong các bảng.
Ví dụ ánh xạ 3 và 4 thay đổi cả hai bên. Tuy nhiên, nếu chúng ta hoán đổi bên A và bên B trong ánh xạ 3, chúng ta sẽ có được ánh xạ 4 và ngược lại. Chúng tôi gọi những ánh xạ này là ‘ ổ khóa chống pha ‘.
Bốn ánh xạ khác (1, 2, 5 và 6) chỉ thay đổi trạng thái của một bên của mạch cầu. Tuy nhiên, ánh xạ 1 và 5 là các gương của nhau theo cách tương tự như 3 và 4: bằng cách hoán đổi bên A và bên B chúng ta có thể biến đổi cái này sang cái khác. Điều tương tự cũng đúng đối với ánh xạ 2 và 6. Chúng tôi gọi loại hoạt động này là ‘ ổ đĩa cường độ pha ‘.
Trong các phần sau của bài viết, tôi sẽ nói chi tiết về cả hai chế độ ổ đĩa.
Việc phân loại đơn giản các chế độ ổ đĩa này hoạt động trong hầu hết các trường hợp nhưng không phải cho tất cả. Có một số chế độ ổ đĩa bí truyền hơn có thể có lợi trong những trường hợp hiếm hoi nhất định.
Mắc mạch cầu điốt
Nếu bạn xem qua các ánh xạ ở trên, bạn sẽ thấy rằng cả trong thời gian đúng giờ và thời gian tắt, một yếu tố chuyển đổi nằm ở mỗi bên của mạch cầu. Chúng tôi đã làm điều đó để cung cấp một đường dẫn liên tục cho dòng điện động cơ chảy. Nhưng nếu đó là sự thật, mục đích của các điốt này là gì? Chúng ta có thể để chúng ra ngoài? Câu trả lời là không, và lý do là như sau: không thể bật hoặc tắt các công tắc phía cao và thấp một cách chính xác cùng một lúc. Họ là một chút sớm hoặc một chút muộn. Trong một trường hợp, cả công tắc phía cao và phía thấp sẽ bật trong một thời gian ngắn, trong khi cả hai công tắc kia sẽ tắt trong giây lát.
Nếu cả hai đều bật, bạn đã tạo một điều kiện bắn xuyên rất xấu. Chúng tôi muốn tránh làm chập mạch nguồn cung – thậm chí trong giây lát – bằng mọi cách. Vì vậy, tất cả các thiết kế cầu thực tế đều bị sai lệch theo cách khác, đảm bảo rằng hai công tắc không bao giờ được bật cùng một lúc, nhưng kết quả là chúng sẽ bị tắt trong một thời gian ngắn trong khi chuyển đổi.
Bây giờ, khi cả hai công tắc tắt ở một bên, dòng động cơ không có nơi nào để chảy. Điều đó thật tệ theo một cách khác: điện áp động cơ sẽ tăng cao đến mức cần thiết để tạo ra một đường dẫn cho dòng điện chạy qua. Cú nhảy điện áp đó có thể sẽ giết chết một trong các công tắc và đường dẫn dòng điện được tạo ra thông qua công tắc bị hỏng. Đó không phải là một cách tốt đẹp cho mạch cầu để đi, vì vậy một số bảo vệ là cần thiết. Vai trò của điốt bắt là cung cấp đường dẫn cho dòng điện trong những khoảng thời gian chuyển mạch ngắn này mà không cần điện áp động cơ cần tăng quá cao. Trong một số triển khai, các điốt nội tại của các công tắc MOSFET được sử dụng làm điốt bắt, ví dụ, khi các BJT được sử dụng làm phần tử chuyển mạch, các điốt phải được cung cấp bên ngoài.
Một điều khác để thảo luận là tại sao không sử dụng điốt để dẫn dòng điện ngoài giờ? Câu hỏi chính quyết định câu trả lời là tản nhiệt. Cái nào chạy mát hơn: diode hay công tắc?
Trong hầu hết các thiết lập cầu, dòng điện thay đổi tương đối ít trong thời gian bật và tắt so với dòng trung bình chảy qua động cơ, vì vậy đối với các cuộc thảo luận sau tôi sẽ giả sử dòng điện không đổi.
Sự khác biệt giữa một diode và công tắc (không phụ thuộc vào công nghệ chuyển mạch) là trong khi các phần tử chuyển mạch của bạn (khi chúng đóng) có điện trở tương đối ổn định và thấp, thì một diode dẫn có sự sụt giảm điện áp tương đối không đổi trên nó. Điều này có nghĩa là công suất tiêu tán trên công tắc tỷ lệ với bình phương của dòng điện:
P switch = V switch * I = R switch * Tôi 2
trong khi công suất trên diode quy mô tuyến tính:
P diode = V f * I (trong đó V f là độ sụt điện áp thuận của diode)
Từ đó bạn thấy rằng chừng nào hiện nay là thấp hơn so với V f / R chuyển đổi , bạn nên sử dụng chuyển sang tiến hành off-thời gian dòng điện. Đối với hầu hết các điốt V f nằm trong phạm vi 0,2 đến 1V, trong khi công tắc R thường thấp hơn 1Ω, thường thấp hơn 100mΩ. Việc chuyển đổi R cũng dễ dàng hơn nhiều so với V f nếu bạn gặp rắc rối với tản nhiệt, chưa kể rằng V f thường tăng cao hơn một chút so với dòng điện. Bạn có thể tìm thấy các MOSFET có điện trở trên dưới 10mΩ mà không gặp quá nhiều khó khăn. Ngay cả cầu H tích hợpchứa FET với điện trở dưới 25mΩ những ngày này. Nếu chúng ta lấy mạch cầu đó làm ví dụ, thì diode bên trong của nó có điện áp chuyển tiếp 0,8V và điện trở 23mΩ (đây là những giá trị tiêu biểu). Với những con số đó, bạn sẽ thấy rằng điểm giao nhau là 35A, vượt quá giới hạn dòng điện 30A được đánh giá cho phần đó. Điều này là điển hình ngoại trừ các ứng dụng cực kỳ cao: bạn vận hành mạch cầu dưới điểm giao nhau, trong đó việc sử dụng các công tắc để dẫn dòng điện ngoài giờ sẽ có lợi hơn.
Tóm lược
Trong bài viết này, chúng tôi đã đi qua việc xây dựng cơ bản của một mạch cầu H và tạo ra một danh mục các chế độ hoạt động hữu ích. Chúng tôi đã xác định hai loại chính: ổ đĩa pha và ổ đĩa chống pha. Trong các phần sau của loạt bài tôi sẽ xem chi tiết ở cả hai chế độ ổ đĩa đó.
Chúng tôi cũng đã thảo luận ngắn gọn về vai trò của điốt bắt, tại sao chúng lại cần thiết và tại sao chúng không được sử dụng để dẫn dòng điện nhiều hơn mức cần thiết.
Nếu bạn cảm thấy cuộc thảo luận ở đây khá cao và có thể là sơ cấp, đừng lo lắng, có rất nhiều chi tiết sẽ đến.